



无人机搜索思维导图

无人机搜索详解
树图思维导图提供 无人机搜索 在线思维导图免费制作,点击“编辑”按钮,可对 无人机搜索 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:befba9a9cd24d61d8c32a7210614adef
思维导图大纲
无人机搜索思维导图模板大纲
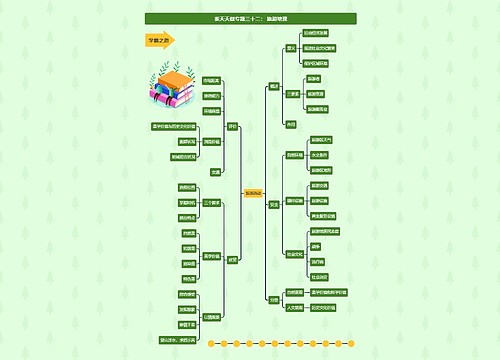
建图与避障
相关变量
md_.occupancy_buffer_inflate_
意义:大小为buffer_size的一维数组,用来存储膨胀后的体素的占用信息,为1表示被占用,即有障碍
引用:在函数clearAndInflateLocalMap()和cloudCallback()被置为1,表示对应位置有障碍
md_.occupancy_buffer_
意义:大小为buffer_size的一维数组,用来存储对应位置的占用信息,当占用信息超过阈值后,认为该位置被占用即有障碍
引用:在raycastProcess()中更新
mp_.map_voxel_num_
意义:三维向量,表示地图网格的数量(在索引空间)
mp_.map_voxel_num_(i) = ceil(mp_.map_size_(i) / mp_.resolution_);
程序执行过程
定时器:updateOccupancyCallback( )
将深度图像中的像素点投影到世界坐标系中: projectDepthImage()
对投影后深度信息进行射线投射并更新地图占用信息raycastProcess()
根据占有信息清除并膨胀局部地图clearAndInflateLocalMap()
障碍地图
publishMapInflate()
publishMap()
获取深度图像和相机姿态:depthOdomCallback()
规划与控制
飞行模式target_type_
target_type_ == TARGET_TYPE::PRESET_TARGET
target_type_ == TARGET_TYPE::MANUAL_TARGET
订阅目标点坐标waypointCallback()
planNextWaypoint():根据目标点调用planGlobalTraj进行路径规划,生成一系列轨迹点
改变状态机状态
// 设置标志位表示已有目标点 have_target_ = true;
// 设置标志位表示有新目标点 have_new_target_ = true;
planGlobalTraj()根据给定的初始点和目标点,每间隔 dist_thresh 距离进行一次取样,最后对起点、终点以及中间采样点进行三阶曲线拟合,并最终将拟合曲线存储在global_data_里面
避障:定时器checkCollisionCallback()
相关思维导图模板

树图思维导图提供 10.15-付费推广 ·(十一)· 全站配合搜索节奏解析与引力魔方数据优化 在线思维导图免费制作,点击“编辑”按钮,可对 10.15-付费推广 ·(十一)· 全站配合搜索节奏解析与引力魔方数据优化 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:ca82ce4ec961ffd61f0a484a5c579820
树图思维导图提供 搜索标题-简单易懂实战演练 在线思维导图免费制作,点击“编辑”按钮,可对 搜索标题-简单易懂实战演练 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:952c39e7b73e2f0c33582c44acb6c418



 上海工商
上海工商