



航天公开课稳定精度的度量思维导图

航天公开课稳定精度的度量思维导图
树图思维导图提供 航天公开课稳定精度的度量 在线思维导图免费制作,点击“编辑”按钮,可对 航天公开课稳定精度的度量 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:4d35c17f1c016c78d073da6e04d380c5
思维导图大纲
航天公开课稳定精度的度量思维导图模板大纲
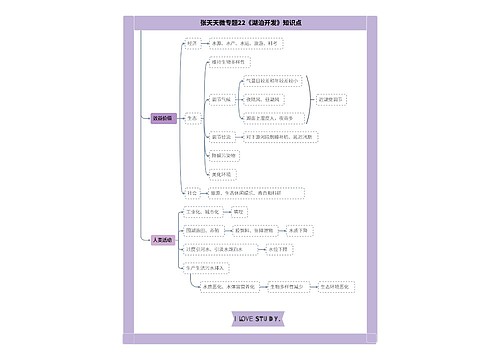
跟踪系统的任务
船载卫通站伺服跟踪系统的重要任务是稳定天线波束指向,隔离船体运动对波束指向的影响
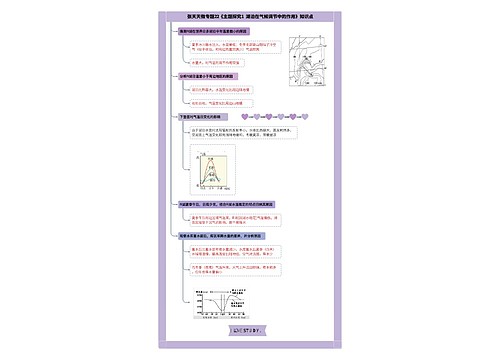
其隔离效果如何表示,通常船体的摇摆运动近似为正弦运动
即船体在浪涌的冲击下以某一角频率做周期性的横摇、纵摇和艏摇运动
R m 为横摇的最大角度;ω R 为横摇的角频率
如果对天线不采取稳定措施,则天线随船一起做正弦摇摆运动,采用上述的稳定天线波束方法后
天线就不会随船体一起运动,而会相对船体运动,保持空间指向不受船体运动影响
但稳定总是有误差的(不管控制系统是几阶无静差系统)
其误差同样是正弦周期函数,对于自身稳定方法,其隔离度(对5~7m天线来说)可达到30~35dB
如果采用前馈补偿以及单脉冲则综合隔离度可达45dB左右
船在海上受风浪影响
船载天线随运载体的运动也在不停地运动
天线的波束范围一般远比船摇幅度小,不采取任何措施,伺服系统很难保证天线稳定地指向目标
与陆地伺服系统相比,船载伺服系统必须克服船摇影响,以解决稳定问题才能实现对目标的跟踪
跟踪稳定性
大型远洋船舶是一个运动的刚体,在大海中运动有6个自由度
其中3个是线位移(进退、横荡和升沉)、3个是角位移(偏航、横摇和纵摇)
对于恒速航行的船舶,一般横摇和纵摇的幅度大、周期短
船摇的扰动通过船体直接传到天线座体上,所以天线机械轴要随船摇在该方向上运动
这是影响船载伺服系统跟踪稳定性进而影响跟踪精度的主要因素之一
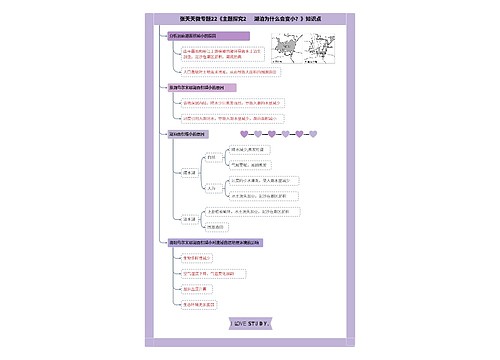
船摇前馈法
是利用惯导系统测出相应方向的船摇角和角速度
经坐标变换折算后反向加到相应支路的速度环路输入端
给船摇扰动的隔离增加一提前量,减小船摇引起的附加角误差
这种方法隔离船摇效果受到大型船摇角速度的精度
测量点与补偿点摇心不一致、船体变形等因素所带来误差的影响
还有坐标变换误差及回路对信号大小的非线性等因素的影响
使之对船摇量的隔离度要求不会太高
因而这种方法比较适用于大型船载天线在其船摇角速度不大的情况下
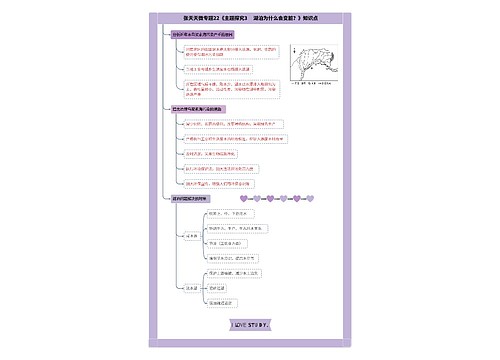
双马达驱动系统
速度环有两种方案
一种是“和”速度环
即同一天线轴上的两台马达共用一个速度环,环内只有一个速度调节器
速度反馈信号取两台马达测速机输出之和
另一种是“独立”速度环
即两台马达各自构成一个速度环,各用各的调节器和测速机反馈
两个速度环用一个速度指令控制
在和速度环中,同一速度调节器的输出作为两个独立电流环的电流指令
从而保证了两台马达负载电流的一致性
至于两台马达的平均速度,由于通过机械齿轮箱硬性连接,不可能不一致
和速度环的不足之处是速度反馈信号不可能反映两台马达之间的差速振荡
因而和速度环没有抑制差速振荡的能力,必须另设差速振荡抑制电路,以便消除差速振荡
独立速度环有抑制两台马达之间差速振荡的能力
但由于两台测速机的灵敏度和非线性以及其他电子元件的不一致、参数漂移
很难保证两个调节器输出的电流指令一致,有可能导致两台马达电枢电流相差甚远
因此,在独立速度环方案中还需另设电流均分电路
综合这两种方案,差速振荡抑制电路和电流均分电路复杂程度相差不大
对提高系统性能都能起到重要的辅助作用
相关思维导图模板

树图思维导图提供 904名中国成年人第三磨牙相关知识、态度、行为和病史的横断面调查 在线思维导图免费制作,点击“编辑”按钮,可对 904名中国成年人第三磨牙相关知识、态度、行为和病史的横断面调查 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:10b9a8a2dd2fb4593f8130ef16c320fc


树图思维导图提供 9.战斗的基督教 在线思维导图免费制作,点击“编辑”按钮,可对 9.战斗的基督教 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:33d168acd0cd9f767f809c7a5df86e3a


 上海工商
上海工商