



航天公开课前馈问题思维导图

航天公开课前馈问题思维导图
树图思维导图提供 航天公开课前馈问题 在线思维导图免费制作,点击“编辑”按钮,可对 航天公开课前馈问题 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:139ed3d3eb6380f2bc7297bba7703616
思维导图大纲
航天公开课前馈问题思维导图模板大纲
精度
是船载天线伺服跟踪设备的重要指标,但是提高精度减小误差遇到一个矛盾
减小系统误差就要求增加系统带宽,而减小随机误差则要求减小系统带宽
对于在船摇情况下跟踪快速目标的伺服系统,加速度和速度都很大,但是伺服带宽不能太宽
相应速度常数、加速度常数也不能高,否则将会导致跟踪时的滞后误差较大,甚至有丢失目标的可能
解决滞后大可能导致丢失目标
采用前馈的方法,即提前加入一个量,使系统运行到下一个位置正好是要求的位置
也即伺服常用的开环控制或开闭环复合控制
一般用模拟或数字的办法把所需量经计算加入系统中,这样既有闭环回路作用
又有加入系统的前馈量控制。如果参数调整合适,滞后误差可以减小很多
前馈补结构特性
速度补偿也叫速度前馈控制(开环控制),它与积分陀螺反馈控制(闭环控制)共同构成复合控制
采用这种方法可以提高船体拢动的隔离度,改善系统性能
与不加速度补偿时相比,分母是相同的,分子不同,若W F 是速度闭环传递系数的倒数
此时补偿效果最好,然而速度环闭环传递系数本身不太准确,所以补偿系数也不可能太准确
不可能达到100%补偿,不难看出,这种复合控制是提高系统隔离度的有效途径
前馈控制(开环)和反馈控制(闭环)相结合的复合控制系统
可以使系统精度大大提高,但并不影响系统的稳定性
在系统中,反馈回路主要用于满足系统的稳定性,而前馈回路主要用来满足系统的精度
对于单独的反馈系统既要满足稳定性要求又要满足精度要求
因此,K β 值需要很大,然而实际上不可能太大,太大会引起系统不稳定
但在复合控制中,反馈回路只考虑稳定性要求,可以适当减小K β 值,以满足其稳定性要求
前馈回路用来提高系统的速度和精度,即使K β 值减小
系统也可以达到较高的精度,这也等效地提高了K β 值
搜索位置环船航渡过程
由于船的摇摆,初始捕获目标往往不太容易,尤其是在海况比较差的情况下,矛盾显得更为突出
另外由于航向变化,天线有可能被遮挡,如果出现这种情况,目标就会丢失
要恢复跟踪需重新进行捕获,为解决这两个问题,专门设置一个搜索位置环
原理和实现方法
下位机通过快速数引环将天线转到计算的大地坐标A d 、E d理论指向值(此时C轴应回中心零位)
关闭E、C轴搜索位置环和陀螺环,若已发现目标,立即断开位置环,关闭自跟踪环
若未发现目标,则在搜索环和陀螺环状态下执行扇扫,直至捕获目标转自跟踪
同理,当出现遮挡(这种遮挡往往有一个过程、遮挡甲板位置也是可知的)
下位机立即做出反应,退出跟踪,进入搜索位置环,此时天线仍然稳定在出现遮挡时的空间位置
这有效地实现了现场位置保护,遮挡在一定时间退出后,可很快恢复跟踪,无须进行重新搜索
离度不会很高
一般不单独使用。通常作为陀螺反馈法的辅助手段
当船摇扰动量较小时,单独使用陀螺反馈法隔离船摇能保证船摇残差很小,不用加前馈补偿
由于此时环路的带宽较窄,通过系统的噪声小,随机误差也小
当船摇扰动量较大时,单独使用陀螺反馈法隔离船摇残差较大,此时加上船摇前馈
可有效地提高船摇隔离度,而不影响系统对噪声的隔离作用
相关思维导图模板
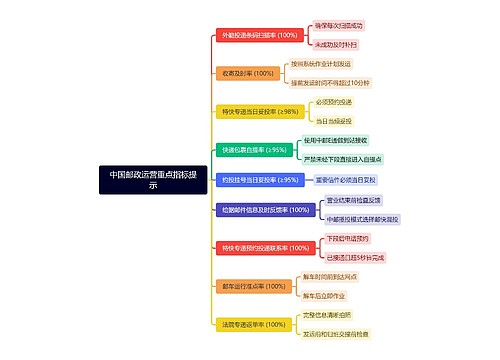
树图思维导图提供 中国邮政运营重点指标提示 在线思维导图免费制作,点击“编辑”按钮,可对 中国邮政运营重点指标提示 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:549bb5cd0fb673b56a2dd461adc52fbd
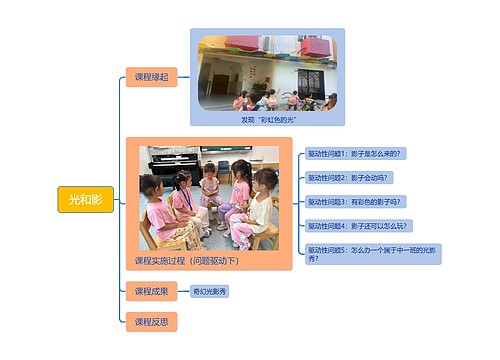
树图思维导图提供 光和影 在线思维导图免费制作,点击“编辑”按钮,可对 光和影 进行在线思维导图编辑,本思维导图属于思维导图模板主题,文件编号是:2f4c9606f70a3f8d98ec4d65695dc3d1



 上海工商
上海工商